The AERobot hardware is open-source (CC BY 4.0). On this page, you can read about components and assembly in more detail, download files to build your own (requires expertise), or order it from a manufacturer.
Ordering
Seeed Studio is now manufacturing ready-made AERobot kits! Click here to visit their ordering page, or here for information about quantity discounts.
Please contact Seeed Studio, not us, with customer support questions about the kits they sell.
Components
The image below shows one side (the "component side") of the AERobot PCB, with components highlighted: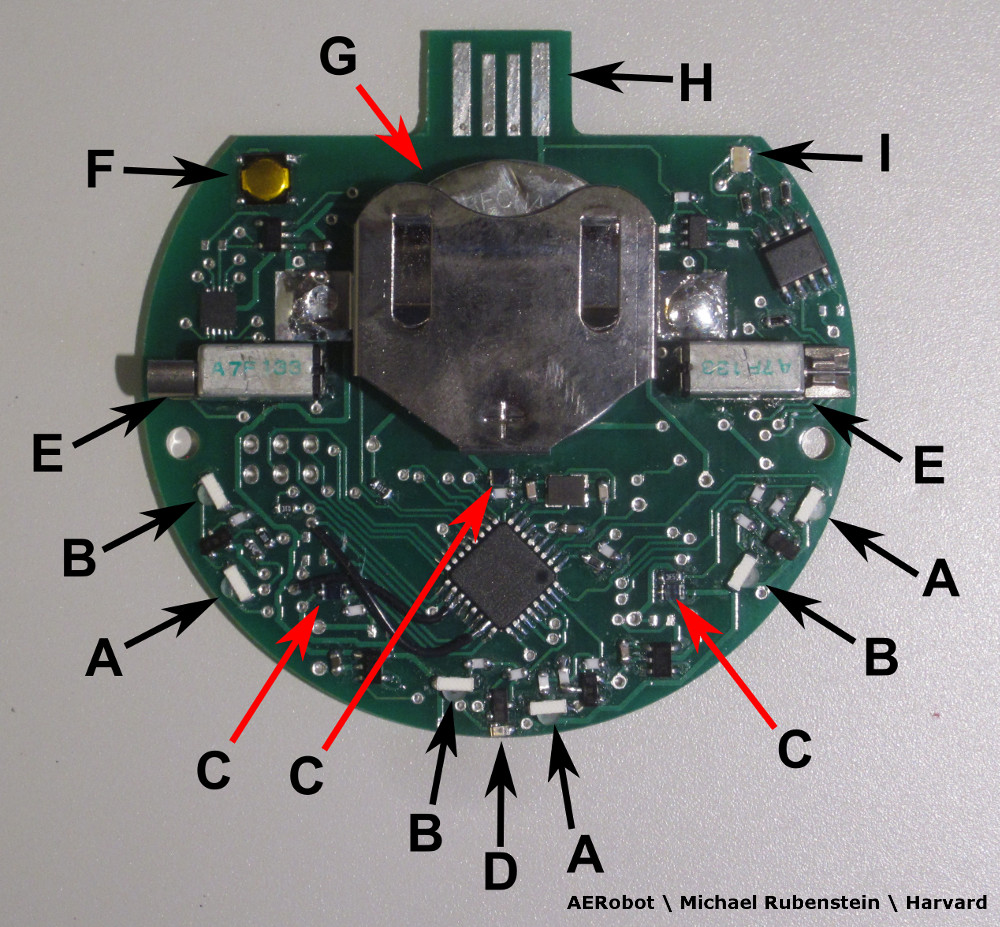
(A) Outward-facing phototransistors (can sense ambient light as well as IR light). (B) Outward-facing IR transmitters. (C) Downward-facing phototransistors. (D) Downward-facing IR transmitter. (E) Vibration motors. (F) Power switch. (G) Rechargeable lithium-ion battery. (H) USB connector. (I) RGB LED.
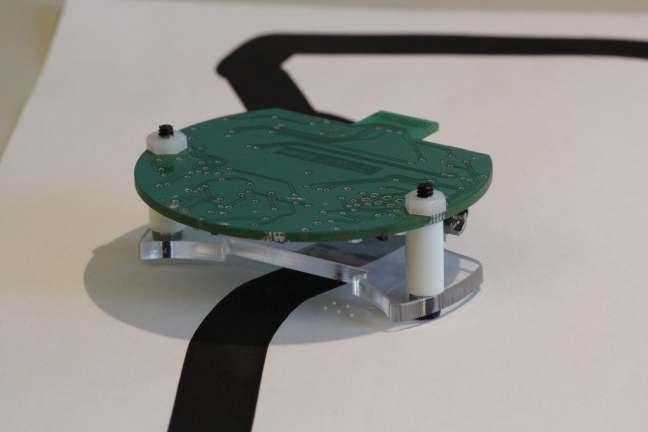
When the robot is plugged into a computer's USB port for charging and programming, it should be inserted component-side-up; when it's running a program, it should be placed component-side-down:

Assembly
The PCB doubles as the robot chassis. To complete the robot, a plastic "foot" is attached with plastic screws and standoffs.
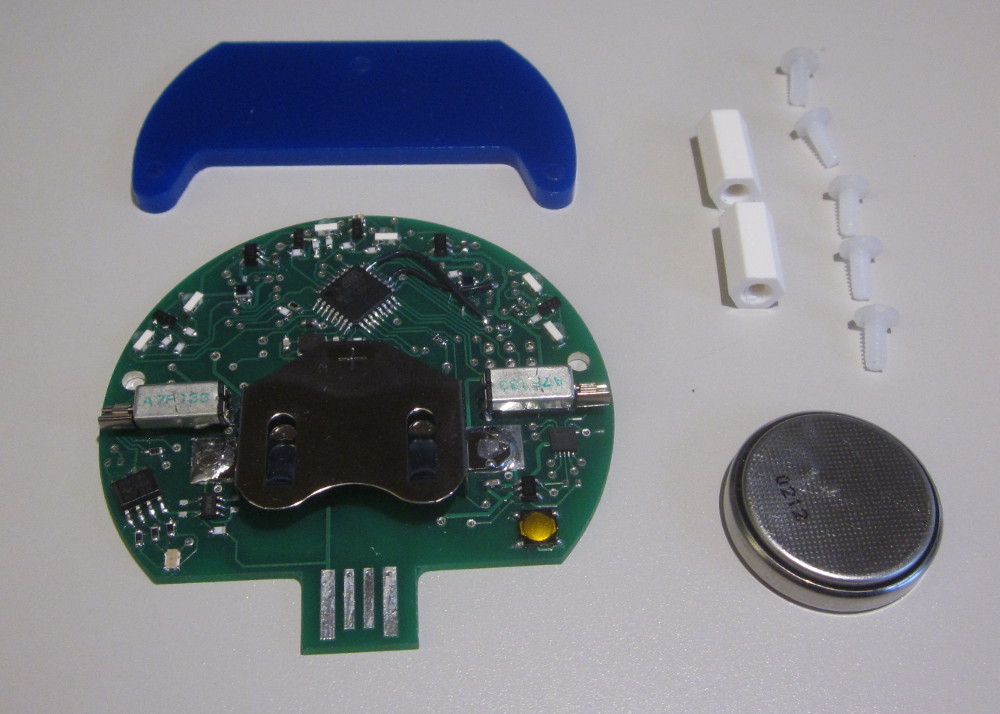
To assemble the robot (1-2 minutes, can be done by hand or with a small screwdriver):
- Slide the battery into the battery holder, positive side facing away from the PCB.
- Insert 3 screws into the holes on the foot.
- Screw the 2 legs into the two outside screws on the foot.
- Use the two remaining screws to firmly attach the legs to the PCB. The foot should be on the component side, by the battery (see images above and video below).
Making your own AERobot
This link lets you download source files to create your own AERobot from scratch: schematics for PCB creation, full bill of materials (price estimates are based on high-volume purchases from common parts distributors, for quantities corresponding to 1000 robots), design for laser-cut foot, bootloader's hex file....